Liqian Ma

CODA E1011
756 West Peachtree Street
Atlanta, GA 30332
I’m a second-year Robotics Ph.D. student at Georgia Institute of Technology, advised by Prof. Yongxin Chen. I received my Bachelor’s degree in Mechanical Engineering from Tsinghua University in 2024. I visited the Intelligent Control Lab at Carnegie Mellon University in 2023.
Research Interests
My research aims to enable agile and reliable motion generation for robots to perform diverse tasks. I work at the intersection of learning-based and model-based approaches:
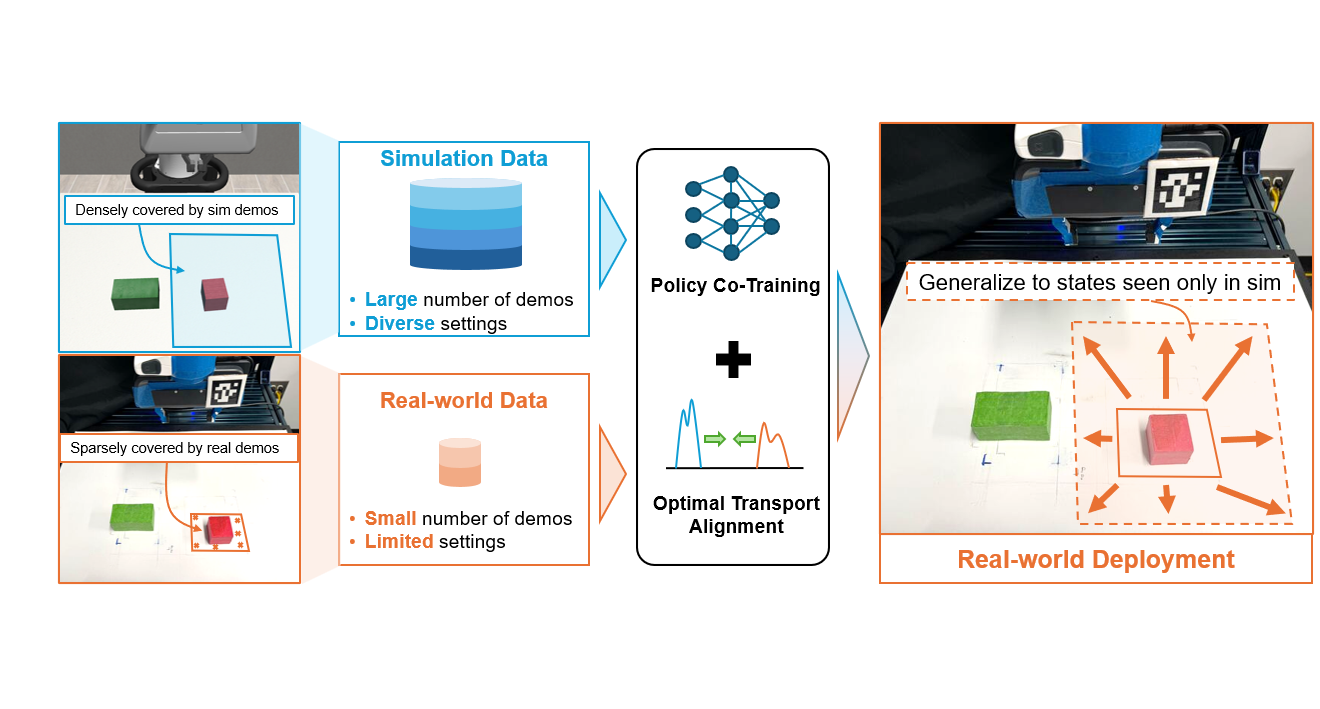
- Learning-based: Imitation Learning, Sim-and-Real Co-training
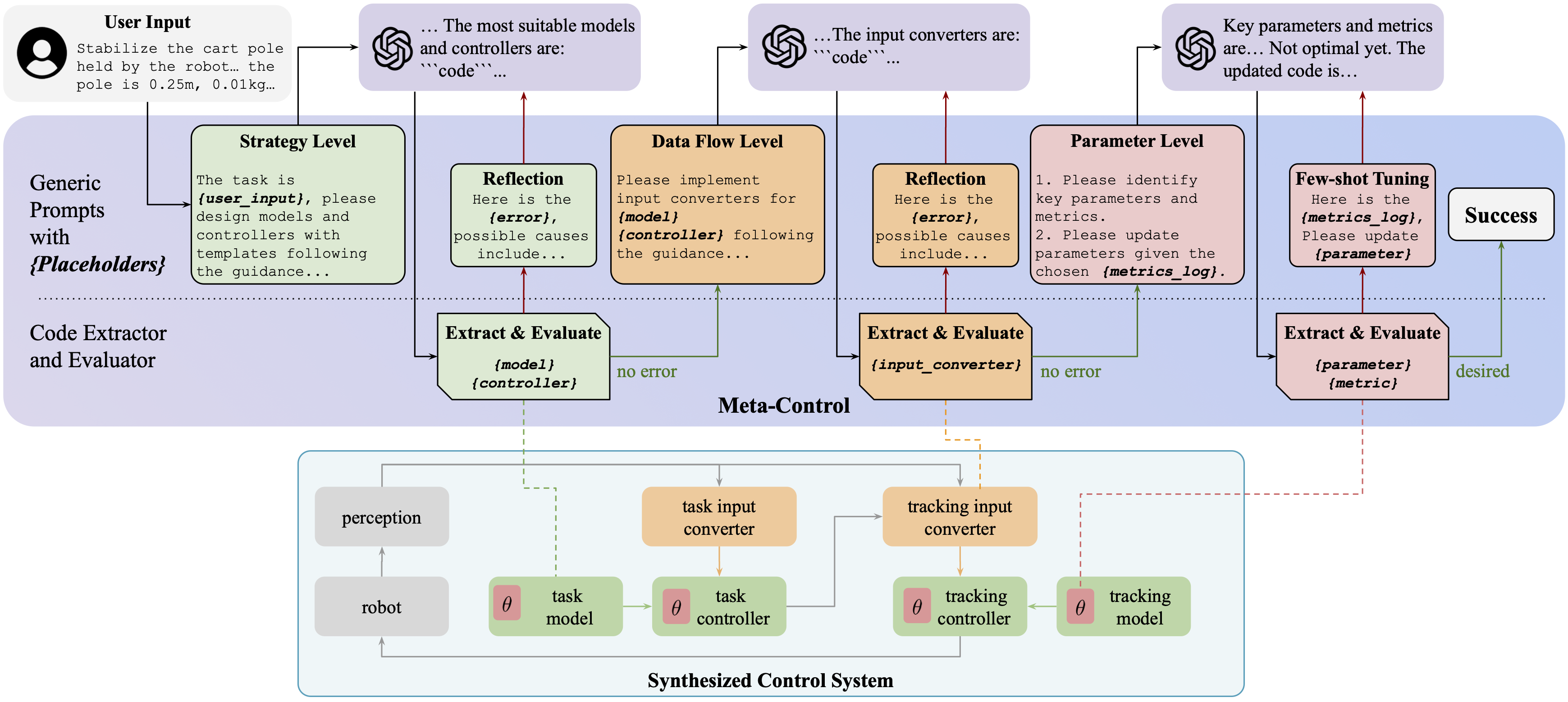
- Model-based: Optimal Control, Stochastic Control, Formal Verification
I am especially interested in combining learning and model-based methods to make robots both adaptable and dependable when operating in complex real-world environments. For example, learning world models that support online planning, enabling robots to generalize to unseen environments, and using model-based planners to generate demonstrations that maximize data coverage for policy training.
Selected Publications
- L-CSS
 Verification of Stochastic Systems Under Signal Temporal Logic SpecificationsIEEE Control Systems Letters, 2025
Verification of Stochastic Systems Under Signal Temporal Logic SpecificationsIEEE Control Systems Letters, 2025
Selected Projects
